中國教育在線
中國教育在線



11月7日,大連理工大學力學與航空航天學院、工業裝備結構分析優化與CAE軟件全國重點實驗室解兆謙教授(共同通訊作者)與美國西北大學John A. Rogers教授課題組、黃永剛教授課題組及西湖大學姜漢卿教授課題組合作,在《自然》(Nature)上發表了題為“基于生物彈性狀態恢復的觸覺感官替代”(Bioelastic state recovery for haptic sensory substitution)的研究論文。這是解兆謙教授繼2022年作為主要作者在《科學》(Science)發表“外周神經可逆傳導阻滯的柔軟且生物可吸收冷卻器”(Soft, bioresorbable coolers for reversible conduction block of peripheral nerves)一文后取得的又一項重要成果。

該研究發明了一種基于生物彈性狀態恢復的無線、低功耗、多刺激模式觸覺皮膚電子器件,通過力-電-磁控制的雙穩態及壓扭耦合結構力學設計,可實現對皮膚不同深度觸覺機械感受器的動態和靜態、法向力和剪切力的多模式激勵。該可編程多模式觸覺激勵的皮膚電子器件在視覺、平衡感和觸覺感官替代中存在廣闊的應用前景。
人體皮膚中多樣的機械觸覺感受器能感知并傳遞豐富的觸覺信息。在社交媒體、游戲、娛樂及生物醫學康復治療中,快速可編程的觸覺激勵器應用廣泛且潛力巨大,能有效替代或增強人體感知能力。然而,現有觸覺激勵器功耗高、模式單一,僅能激活皮膚中單一類型的機械觸覺感受器,且多為有線控制,限制了使用的便捷性和應用的廣泛性。為充分挖掘觸覺界面的應用潛力,需要皮膚中多類型機械感受器的協同參與,以實現多感官互動,這對可穿戴觸覺激勵/感官替代器件的開發提出了新的挑戰。
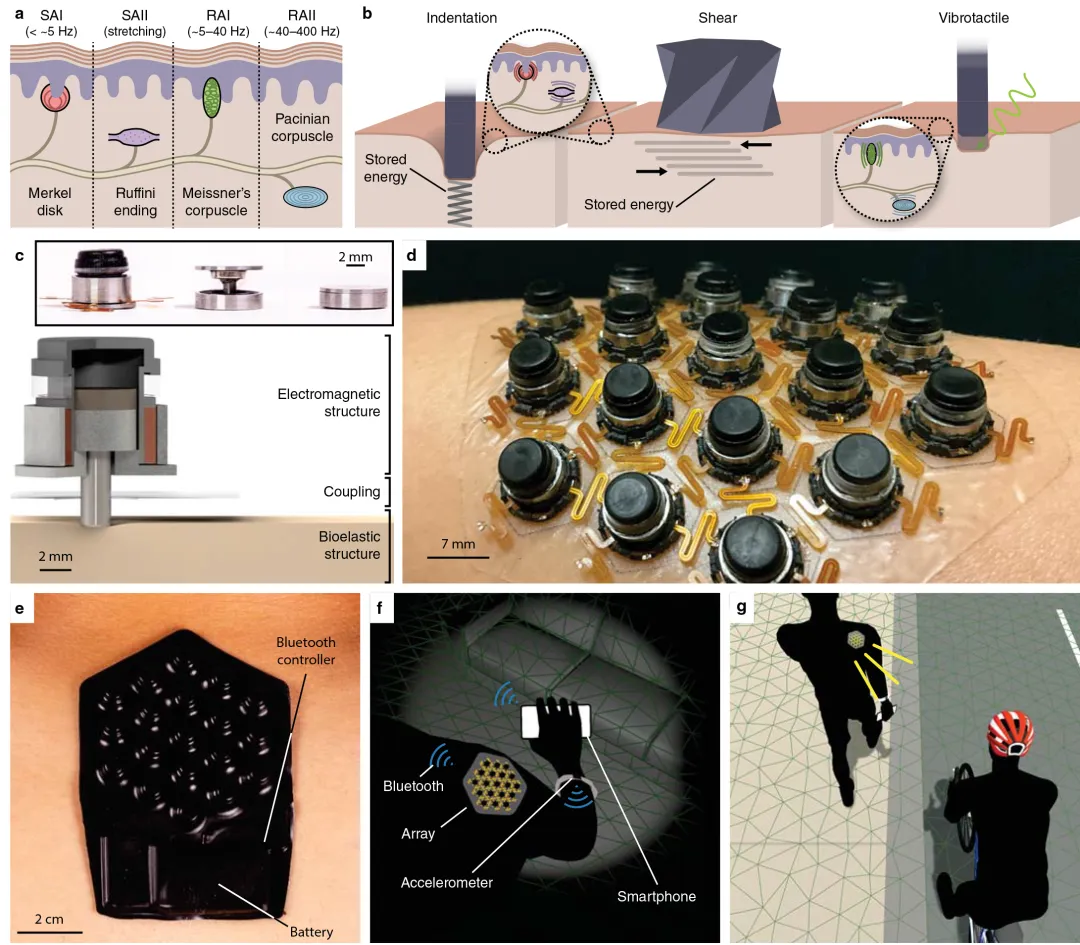
圖1 用于多感官替代的無線、低功耗、多刺激模式觸覺皮膚電子器件
針對上述業界廣泛關注的挑戰性難題,該文創新性設計了一種基于生物彈性恢復的無線、可編程、低功耗且具備多刺激模式的觸覺皮膚電子器件(見圖1)。該器件憑借其獨特的力-電-磁控制雙穩態結構,能夠在瞬態微電流的作用下,于壓縮與放松兩種狀態間實現快速且精準的切換,實現皮膚不同層面的靜態與動態的激勵(見圖2)。同時,器件集成的壓扭力學結構,結合先進的Kirigami設計,巧妙地實現了對皮膚剪切力與法向力的耦合作用,極大地豐富了觸覺激勵的多樣性和精準度(見圖2),為用戶帶來了更為真實、細膩的觸感體驗。此外,該器件采用了輕質的柔性延展力學結構設計,使得整體輕薄且易于穿戴,完美實現了與皮膚的無縫保形貼合,提升了用戶的舒適度,確保了器件在長時間使用過程中的穩定性和可靠性。最為重要的是,該器件集成了先進的無線控制電路系統,能夠根據前方障礙物、使用者身體姿勢及步態等實時信息,智能地調整激勵模式。這種智能化的設計使得器件能夠為用戶提供更為個性化、精準且實時的觸覺反饋,從而在視覺、平衡感和觸覺感官替代等領域展現出廣闊的應用前景。
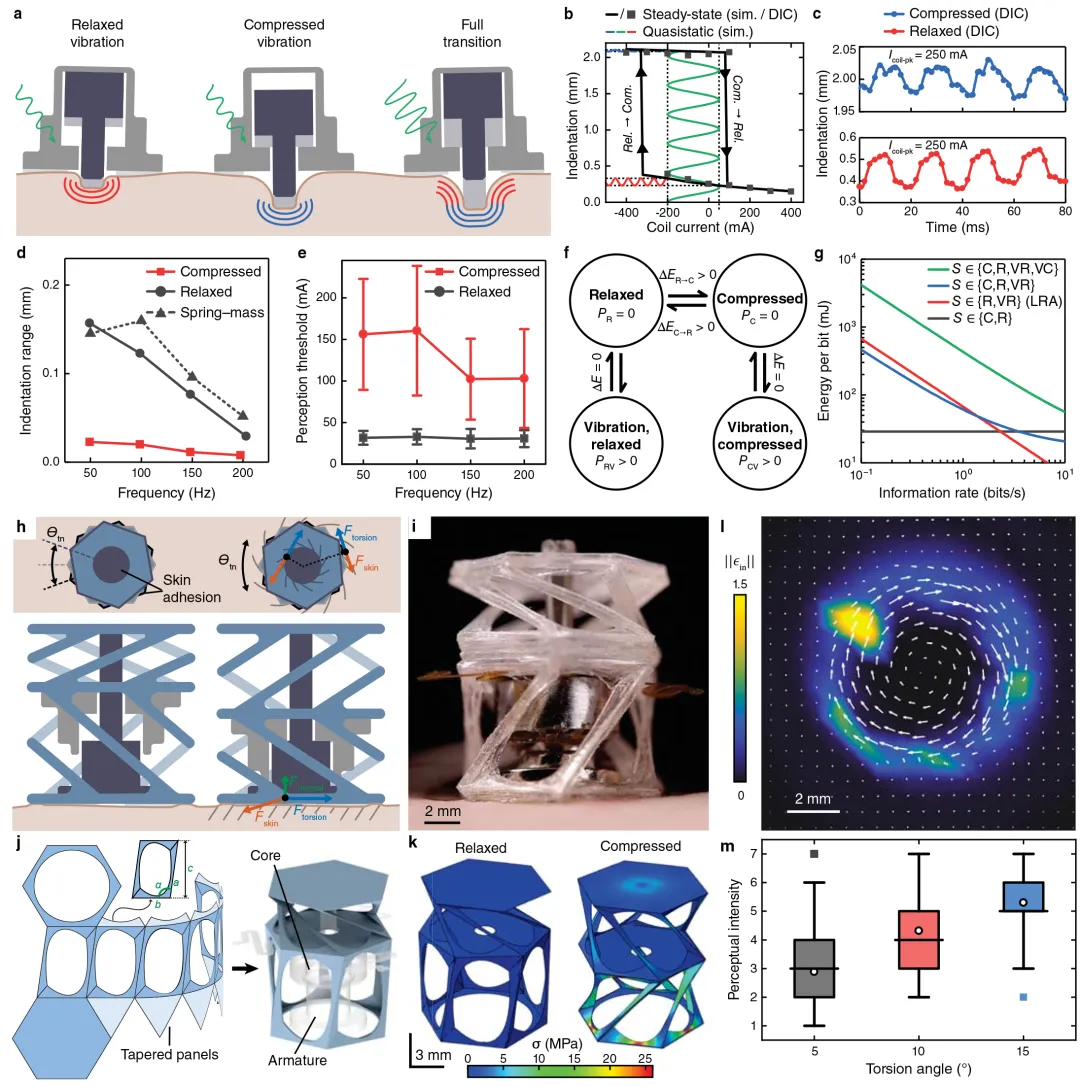
圖2 力-電-磁控制的雙穩態及壓扭耦合力學結構設計
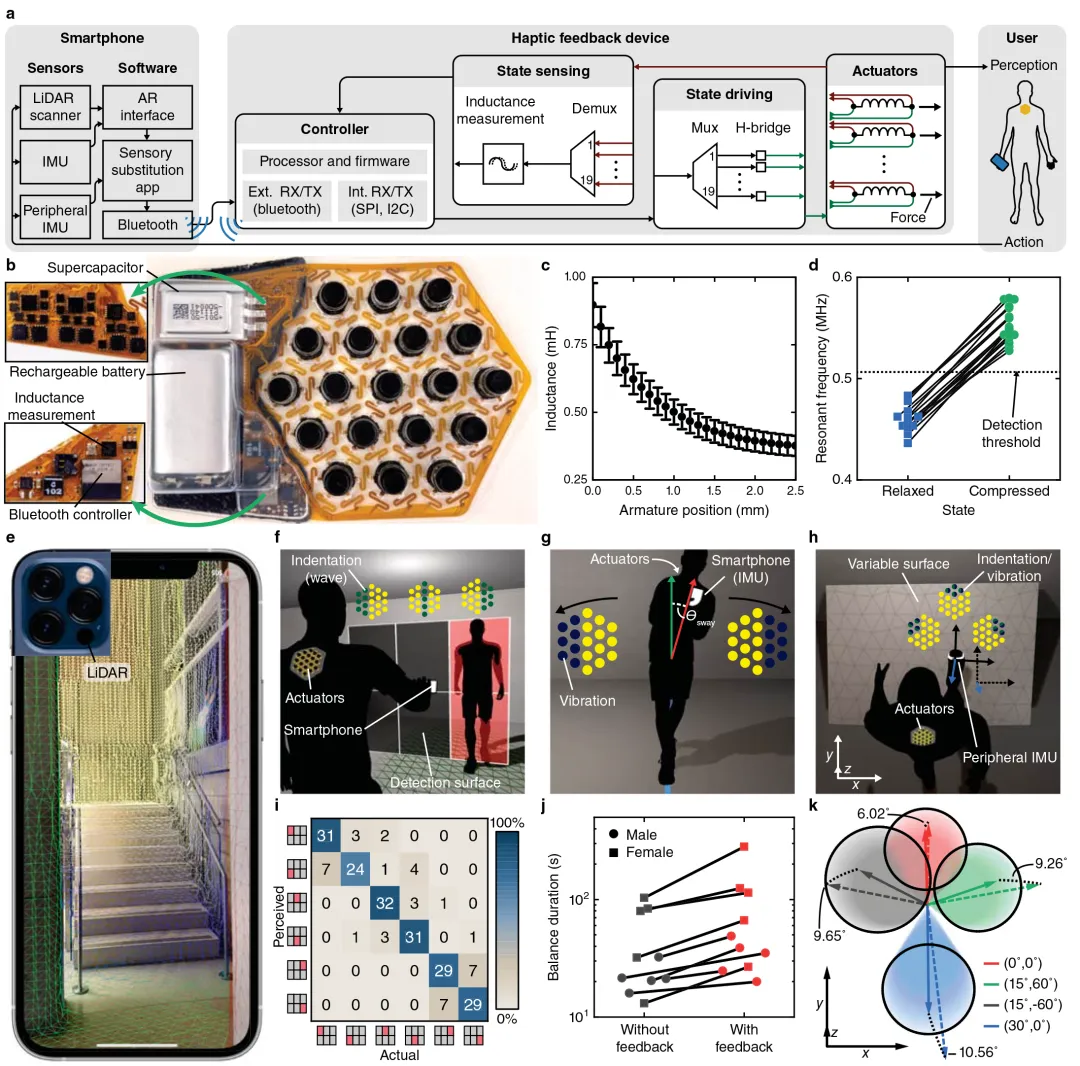
圖3 感官替代人體測試
經過人體測試實驗(見圖3),確切地證明了以下幾點:首先,通過智能手機的LiDAR技術感知前方障礙物,并與觸覺皮膚電子器件協同工作,能夠為視力障礙者提供精確且可靠的導航指引(見圖3f)。其次,利用智能手機內置的慣性測量單元(IMU)實時監測用戶的身體姿勢變化,并與觸覺皮膚電子器件相結合,可以為用藥后等平衡感受損的患者提供平衡感官替代方案(見圖3g)。最后,通過IMU精準追蹤腳步的方向以及與地面的相對角度,配合觸覺皮膚電子器件,可以輔助糖尿病腳部感官缺失的患者調整步態,有效預防跌倒,從而實現對其腳部感官功能的精準替代(見圖3h)。
論文鏈接:https://www.nature.com/articles/s41586-024-08155-9
① 凡本站注明“稿件來源:中國教育在線”的所有文字、圖片和音視頻稿件,版權均屬本網所有,任何媒體、網站或個人未經本網協議授權不得轉載、鏈接、轉貼或以其他方式復制發表。已經本站協議授權的媒體、網站,在下載使用時必須注明“稿件來源:中國教育在線”,違者本站將依法追究責任。
② 本站注明稿件來源為其他媒體的文/圖等稿件均為轉載稿,本站轉載出于非商業性的教育和科研之目的,并不意味著贊同其觀點或證實其內容的真實性。如轉載稿涉及版權等問題,請作者在兩周內速來電或來函聯系。